
To display the Visual Grammar, a flexible and dynamic, but at the same time intuitively accessible and easily recognizable presentation format was necessary. For this reason, a combination of haptic and ludic elements was used to simulate grammatical processes in the three-dimensional world.
Haptic associations can be found in various areas of language. These often contribute to a better understanding of abstract actions and concepts. Sensory motor based concepts in general, and haptic movements in particular can be found in many areas of language in which abstract facts are transformed into concrete mental images, e.g. in the lexis (cf. to understand, ~understand “with the help of a position” or maintenant, literally ‘hold in the hand’ “now”, ~marking the present by the image of “holding time”), or grammaticalized as complex predicates (cf. to give a smile, to take a walk, etc.),(Ströbel, 2010, 2011, 2016). These arevery well suited for reproducing abstract facts by linking them with concrete physical and everyday movements because the produced mental images are easy for the listener to decipher. The reason lies in the fact that similar brain areas are activated when hearing sensory motor-based concepts, such as those thatwould be necessary to perform the actions (Hauk & Pulvermüller 2004; Rizzolatti & Craighero, 2004; Pulvermüller, 2005; Gallese & Lakoff, 2005, Ströbel, 2014, 2016, 2017).
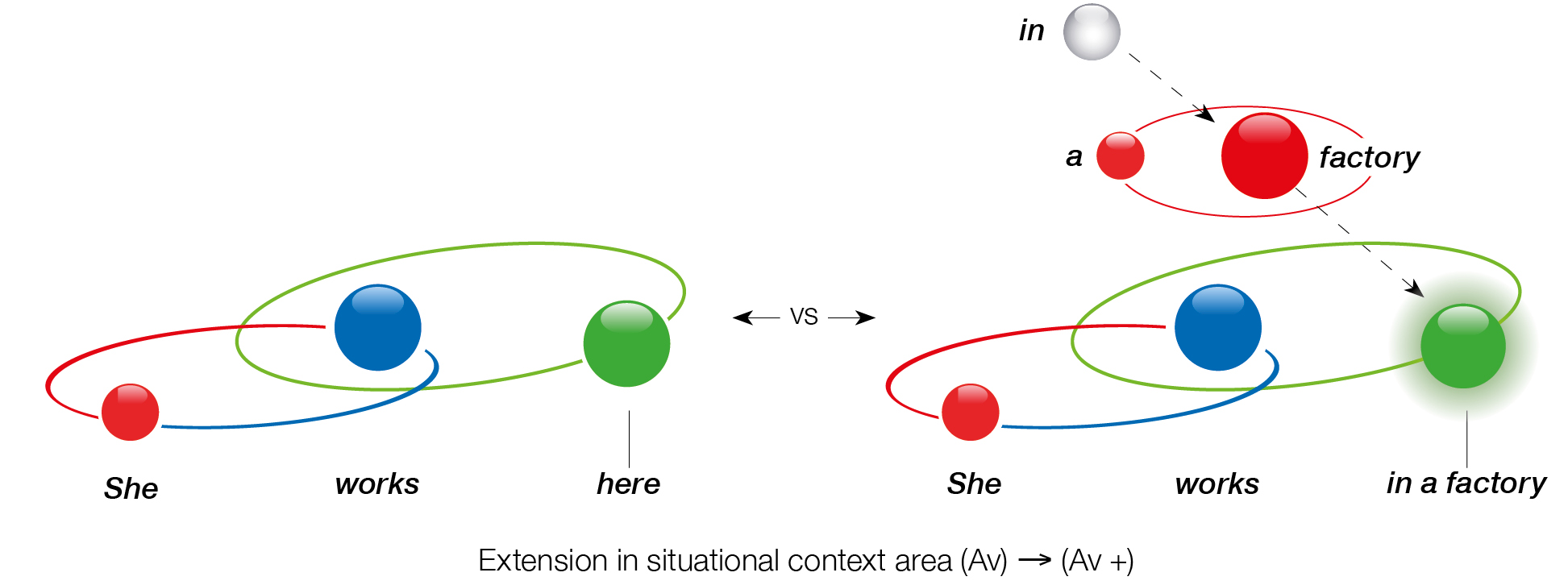
For this reason, appealing, haptic (and also ludic) spherical forms were chosen for the representation of categories, which also show their intrinsic dynamics, since these rarely remain in balance (synchronous view) and are commonly associated with movement, cf. ball, marble, roulette, etc. In addition, this special form of displaying allows the illustration of syntactic, semantic and morphological extensions and reductions without loss of form due to changes in volume. This is briefly illustrated by the example of the extension of the situational context: here (Adv) in a factory (Adv⁺):